[뉴스비전e 정윤수 기자] 10억 분의 1m에 해당하는 1nm(나노미터)를 원자의 반지름과 비교하면?
10분의 1일다.
1나노미터는 원자 20개를 일렬로 배열한 길이에 해당될만큼 매우 미세하다.
나노미터 단위의 로봇 개발이 봇물을 이루고 있다. 이와 같은 로봇을 만들기 위해서는 일반 기계식과는 출발점부터 다르다. 모터나 전원을 사용하지 않고, 그 대신 DNA·박테리아·바이러스 등 생물학적 기반으로 만들어진다.
초미세 나노로봇은 인체의 혈관에 들어가 독성물질을 채집하거나 암세포를 치료하는 의료봇 뿐 아니라 바이오센서, 첨단 3D프린팅 등에 있어 핵심 역할을 할 것으로 전망되고 있다.
◆DNA 나노기계와 전기장의 융합...이동속도 10만배 끌어올린 독일 연구팀
뮌헨 공과대학(Technical University Munich)과 NIM(Nanosystems Initiative Munich)의 연구진은 전기장을 사용해서 DNA 나노기계를 움직이는 새로운 방법을 개발해, 이달 사이언스紙에 연구성과를 게재했다.
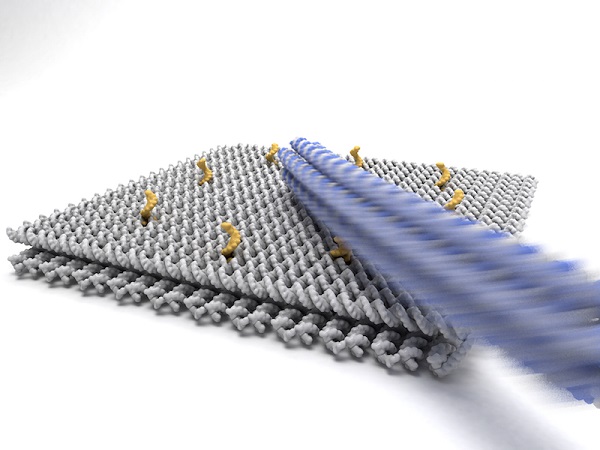
연구팀이 개발한 팔처럼 움직이는 DNA 로보틱스 시스템은 서로 다른 방향으로 매우 빠르게 움직일 수 있다.
전기장으로 구동되는 새로운 “로봇 팔(robot arm)”은 사각형 베이스와 “기어 스틱(gear stick)” 으로 구성되고, DNA 분자를 기반으로 하는 다른 기계보다 용액 속에서 10만배 더 빠르게 움직일 수 있다. 나노로봇은 DNA 종이접기(origami) 방법을 사용해서 만들어졌다.
DNA 종이접기는 정교한 나노구조를 만드는 강력한 방법으로, 이미 10년 전에 처음 개발됐다. DNA 종이접기를 사용해서 나노크기의 로봇 비행기, 분자 무기 등과 같은 장치 역시 이미 만들어졌다.
그러나 이와 같은 시스템은 DNA 교배(hybridization) 반응과 같은 현상으로 구동되는데, 이로인해 시스템의 움직임이 매우 느려지고, 분자의 하중을 견딜만큼의 충분한 힘을 갖지 못하는 단점이 있다.
연구팀은 나노로봇 팔에 전기장을 가하면 몇 밀리세컨드(millisecond) 안에 위치를 기존보다 5배 빠른 속도로 바꿀 수 있다는 점을 발견했다. 전기장을 가함으로써, 컴퓨터로 나노로봇을 제어할 수 있기 때문에 복잡한 이동 패턴도 수행할 수 있다. 이 나노로봇 팔을 이용하면 나노입자와 분자를 움직이게 할 수 있다.
"이 시스템은 생체 분자 나노구조가 완충액 속에서 조작될 수 있다는 것을 보여준 최초의 사례"라고 사이언스紙는 소개하며 "로봇 팔은 플랫폼 위의 화학결합 프로세스에 의해서 영향을 받기 때문에 항원, 항체, DNA-단백질 결합과 같은 생체분자 간의 분자 상호작용을 조사하는 단일-분자 바이오센서로서 사용될 수 있을 것"이라고 전망했다.
바이오센서 분야 뿐 아니라, 새로운 유형의 디지털 메모리와 3차원 프린팅 기술에 있어서도 핵심 기술이 될 것이라는 기대다.
◆한발 앞선 한국 연구진...나노 로봇 시대 주도권 갖게 될까
지난해 10월 유명 과학 학술지인 ‘네이쳐(Nature)’지의 온라인 자매지인 ‘사이언티픽 리포트(Scientific Reports)’에 김민준 서던 메소디스트 대학 석좌 교수팀의 나노 로봇에 관한 논문은 의료계, 기계공학계의 이목을 사로잡았다.
김 교수팀의 발표는 이번 독일 연구진이 개발한 전기장보다 한발 앞서 내놓은 연구성과다.
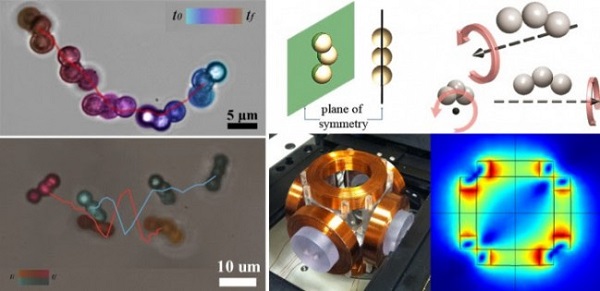
김 교수팀이 개발한 나노 로봇은 편모에 초상자성(superparamagnetic) 나노 입자를 결합한 일종의 생체 로봇으로, 기계공학과 바이오기술의 융합으로 볼 수 있다.
자성을 띤 나노 입자 소재로 만들어진 로봇은 외부에서 자기장을 이용해 콘트롤함으로써, 원하는 곳으로 이동시킬 수 있다.
의료계는 김 교수의 나노 로봇이 완성도를 높인 이후, 기존 항암치료를 대체하는 기술로 주목하고 있다.
기계공학계 역시, 인간이 작업하기 어려운 미세한 기계 부분에 이 로봇이 투입돼 초정밀 작업을 할 수 있을 것으로 전망한다.